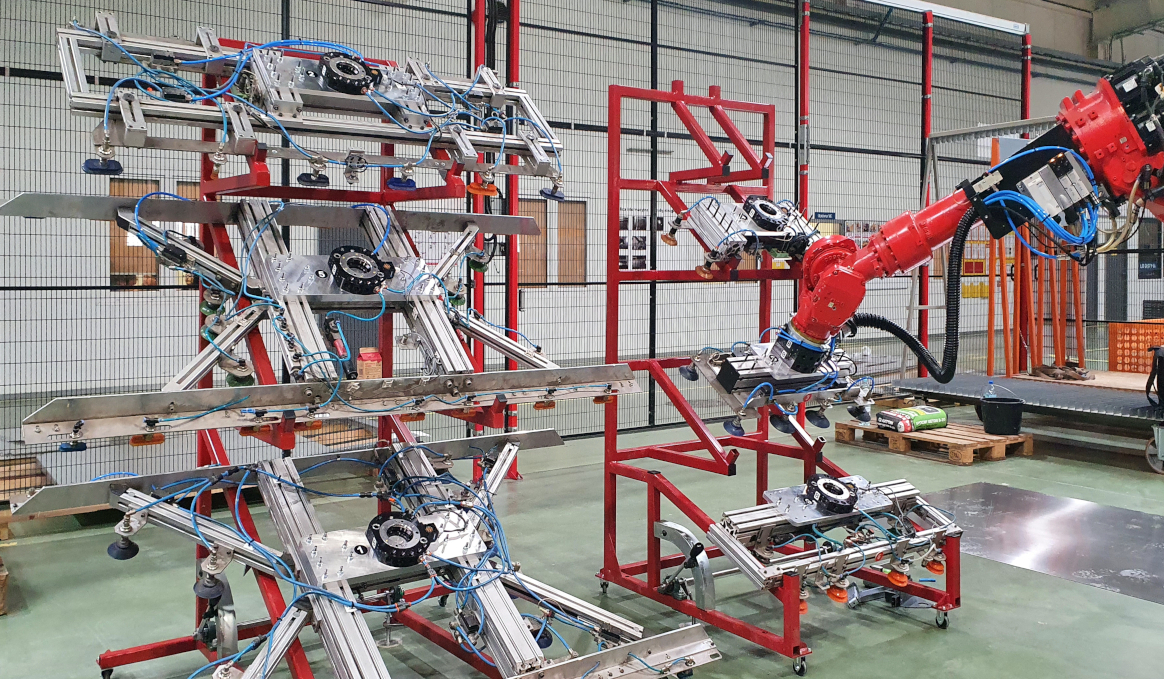
Stanowisko zrobotyzowane przy prasie krawędziowej – instalacja zautomatyzowanego systemu szybkiej wymiany chwytaków
Instalacja zautomatyzowanego systemu szybkiej wymiany chwytaków na kiści robota. System pozwolił znacznie ograniczyć czas niezbędnych prac dotychczas wykonywanych ręcznie, a w praktyce nawet całkowicie je zastąpić. Stanowisko zrobotyzowane przy prasie krawędziowej AMADA. Robot Yaskawa o udźwigu 160kg.








