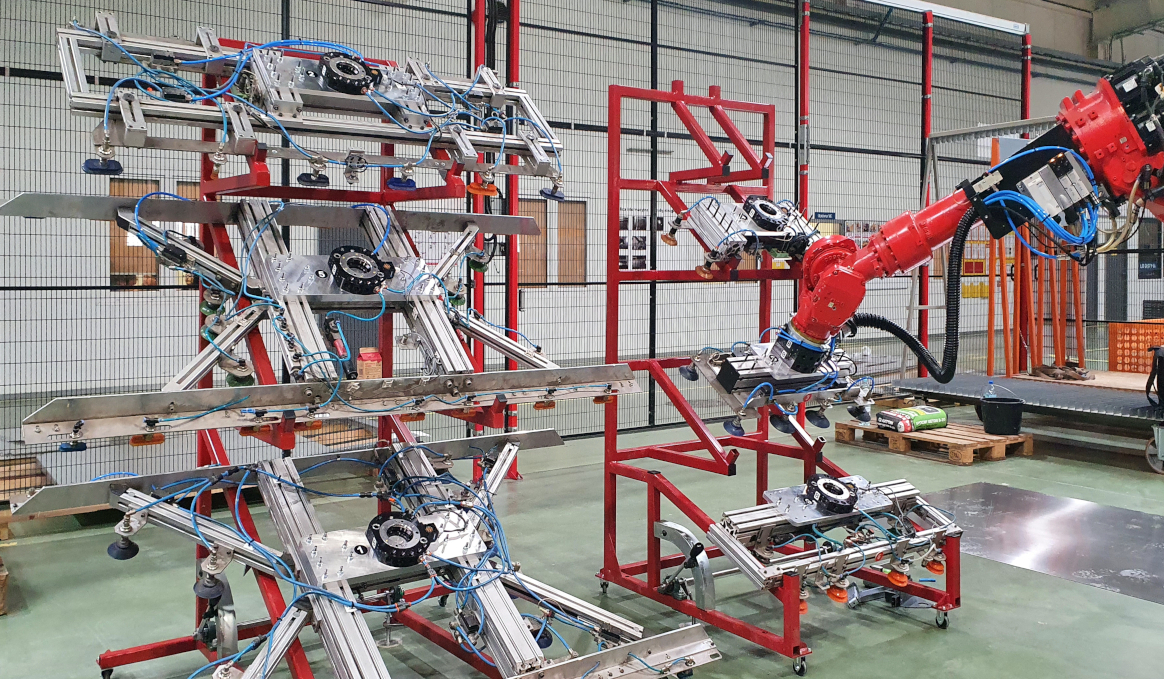
Robot 6-osiowy Yaskawa GP88 + tor jezdny, TRUMPF TruBend 7030, TruPunch 3000 – Stanowisko zrobotyzowane
Integracja robota Yaskawa GP88 z centrum gnącym TRUMPF TruBend7030 oraz wykrawarką TruPunch 3000. Kompleksowa realizacja wykonana przez Naszą firmę – projekt stanowiska, dostawa maszyn, instalacja oraz oprogramowanie robota YASKAWA GP88, projekt i wykonanie chwytaka, stacja centrowania, przenośnik, integracja robota z centrum gnącym TruBend 7030 oraz wykrawarką TruPunch, budowa oraz finalne oprogramowanie stanowiska zrobotyzowanego.