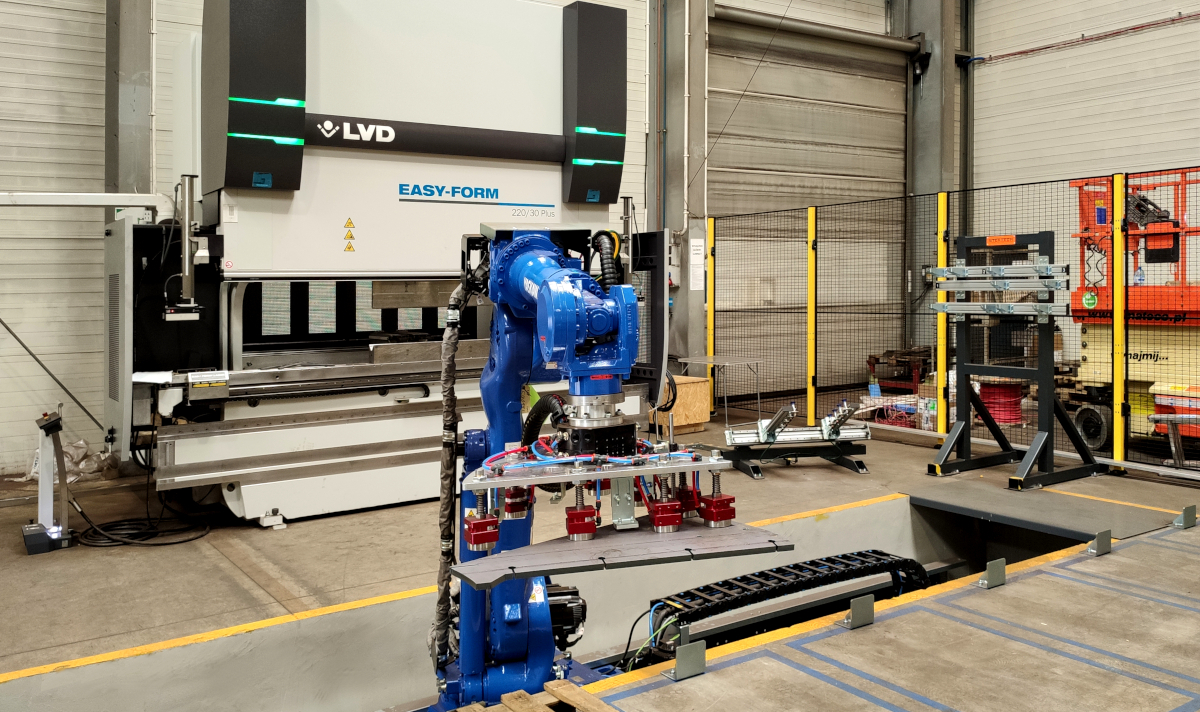
Robotyzacja prasy krawędziowej. Robot 6-osiowy Yaskawa GP50, prasa krawędziowa RICO
Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP50 robot o udźwigu 50kg, prasa krawędziowa RICO, automatyczny magazyn narzędzi robota, paleta wejściowa, pozycjoner, stacja przechwytu detali, laserowy […]