Nowość w naszej ofercie. RBCell12 – Mobile Robotic Bending Cell – przenośne zrobotyzowane stanowisko do gięcia blach
Robotyzacja prasy krawędziowej w zaledwie kilka minut! Chcesz poznać więcej szczegółów – skontaktuj się z nami.

Robotyzacja prasy krawędziowej w zaledwie kilka minut! Chcesz poznać więcej szczegółów – skontaktuj się z nami.

Robotyzacja prasy krawędziowej w zaledwie kilka minut!RBCell12 – Mobile Robotic Bending Cell – przenośne zrobotyzowane stanowisko do gięcia blach. Główne składniki zrobotyzowanej celi:– Mobilna platforma z wygrodzeniem– Robot Yaskawa GP12 – udźwig 12kg– Magazyn detali do gięcia– Stacja pozycjonowania– Stacja przechwytu– Przenośnik taśmowy Obsługa prasy krawędziowej:– ręczna– automatyczna Chcesz poznać więcej szczegółów – skontaktuj się […]
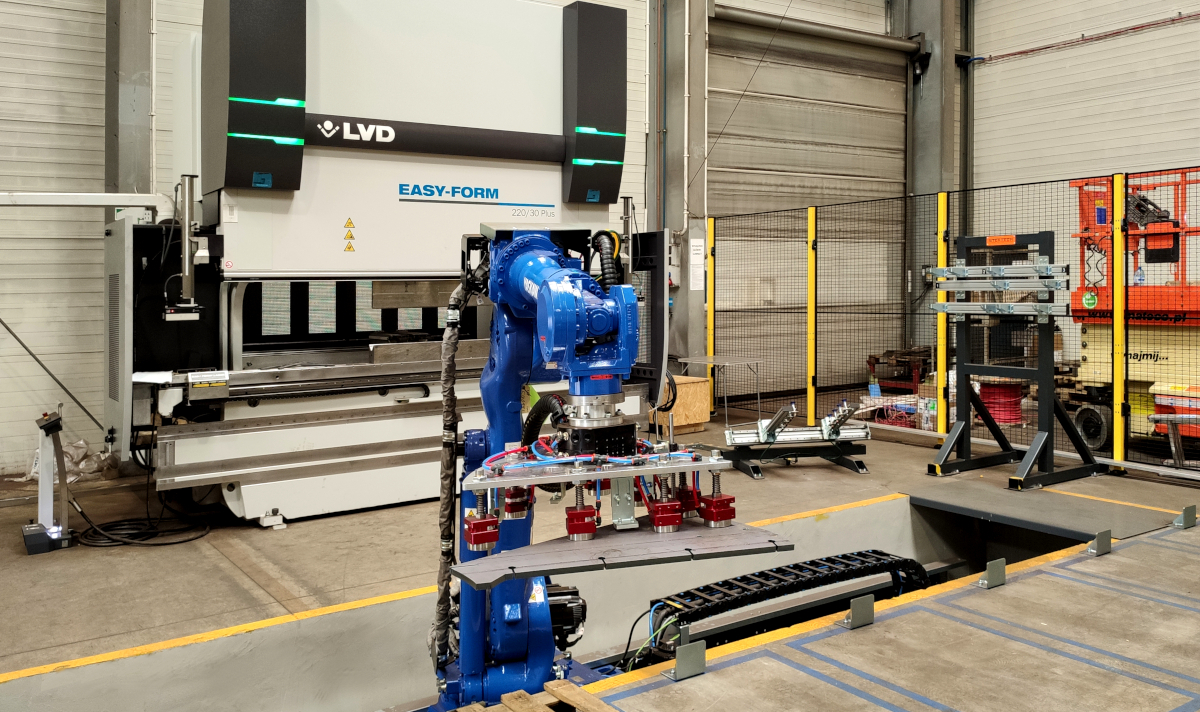
Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP180 robot o udźwigu 180kg umieszczony na 6 metrowym torze jezdnym, prasa krawędziowa LVD EASY-FORM 220/30 Plus, automatyczny magazyn […]

Zrobotyzowana automatyczna cela spawania MIG/MAG. Główne elementy celi: robot spawający YASKAWA AR2010, pozycjoner YASKAWA RWV2 o udźwigu 1000kg i przestrzeni roboczej 2000x1200mm na stronę, źródło spawalnicze FRONIUS TPSi/400 z procesami zwarciowym, PULS, LSC (Low Spatter Control), PMC (Puls Multi Control) i CMT (Cold Metal Transfer) wraz z cycle stepem. Zakres prac: Koncepcja, projekt, budowa, dedykowane […]

Projekt, wykonanie, montaż i uruchomienie układu sterowania linią sortowania/recyklingu. Obsługa taśmociągów sterowanych za pośrednictwem falowników, obsługa wirówek myjących/suszących oraz rozdrabniacza VECOPLAN. Dedykowane oprogramowanie sterownika PLC oraz panelu HMI.
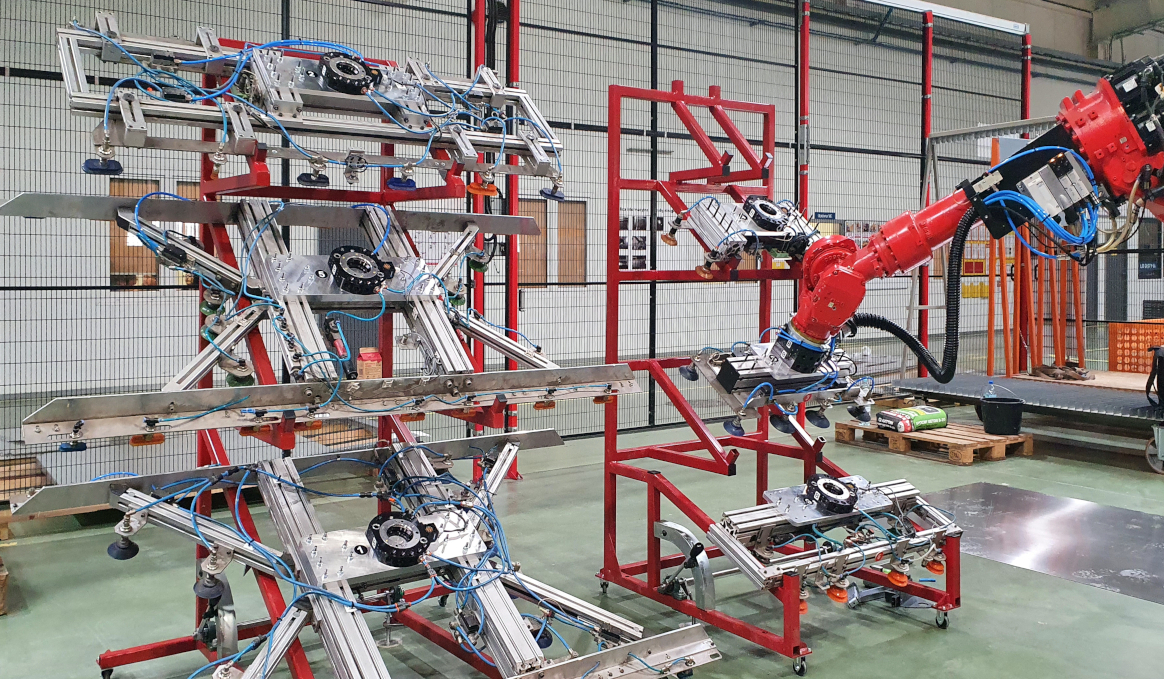
Integracja robota Yaskawa GP88 z centrum gnącym TRUMPF TruBend7030 oraz wykrawarką TruPunch 3000. Kompleksowa realizacja wykonana przez Naszą firmę – projekt stanowiska, dostawa maszyn, instalacja oraz oprogramowanie robota YASKAWA GP88, projekt i wykonanie chwytaka, stacja centrowania, przenośnik, integracja robota z centrum gnącym TruBend 7030 oraz wykrawarką TruPunch, budowa oraz finalne oprogramowanie stanowiska zrobotyzowanego.
Instalacja zautomatyzowanego systemu szybkiej wymiany chwytaków na kiści robota. System pozwolił znacznie ograniczyć czas niezbędnych prac dotychczas wykonywanych ręcznie, a w praktyce nawet całkowicie je zastąpić. Stanowisko zrobotyzowane przy prasie krawędziowej AMADA. Robot Yaskawa o udźwigu 160kg.
Teatr w Warszawie został przez Nas wyposażony w 10 szaf sterowniczych, 11 współpracujących ze sobą sterowników PLC, ponad 200 czujników, 10 calowy dotykowy panel sterujący, 5000 metrów położonych przewodów, zaawansowane dedykowane oprogramowanie całego systemu. Ten zestaw zapewnia w pełni automatyczne sterowanie 120 napędami elektrycznymi oraz oświetleniem LED z regulacją jasności poprzez konsolę DMX.
Projekt, prefabrykacja szafy sterującej, instalacja układu sterowania (sterowanie napędami, sterowanie oświetleniem poprzez kontroler DMX, sygnalizacja akustyczna, układ zasilania oświetlenia awaryjnego). Wykonanie dedykowanego oprogramowania sterownika PLC.
Wymiana kompletnego sterowania robotem przemysłowym GHS Automation. Całość realizacji obejmowała: wykonanie nowej szafy sterowniczej wyposażonej w sterownik PLC oraz wymagane obwody układu bezpieczeństwa oraz układów czujników; dotykowy panel HMI do wprowadzania aktualnych danych, sterowania urządzeniem oraz monitorowania pracy robota; poprowadzenie nowego oprzewodowania do komunikacji z robotem, czujników, integracja z wtryskarką; stworzenie dedykowanego oprogramowania sterującego pracą […]