Targi Warsaw Industry Automatica 2024
Zapraszamy! 📅 Kiedy? 14-16.05.2024📌 Gdzie? PTAK EXPO / TARGI WARSAW INDUSTRY AUTOMATICA

Zapraszamy! 📅 Kiedy? 14-16.05.2024📌 Gdzie? PTAK EXPO / TARGI WARSAW INDUSTRY AUTOMATICA

Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP50 robot o udźwigu 50kg, prasa krawędziowa RICO, automatyczny magazyn narzędzi robota, paleta wejściowa, pozycjoner, stacja przechwytu detali, laserowy […]

Robotyzacja prasy mimośrodowej/korbowej – kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP180 robot o udźwigu 180kg, maksymalnym zasięgu 2702 mm i doskonałą powtarzalnością na poziomie +/- 0,05 mm, prasa korbowa SANGIACOMO, […]
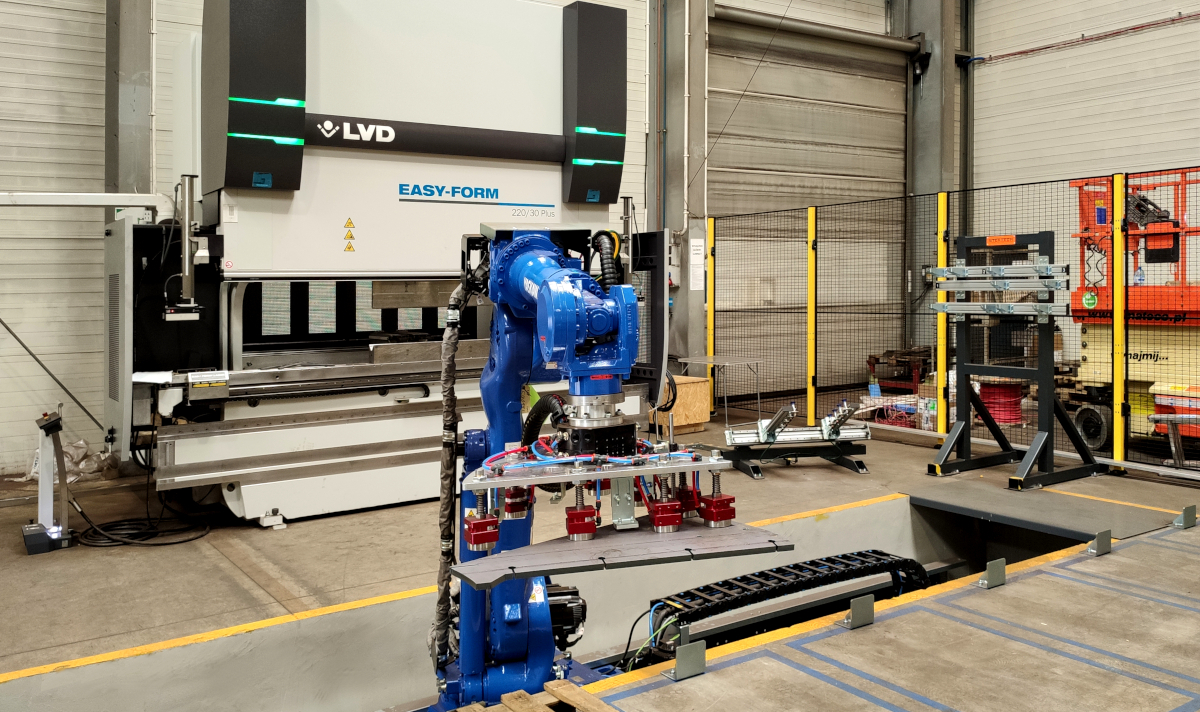
Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP180 robot o udźwigu 180kg umieszczony na 6 metrowym torze jezdnym, prasa krawędziowa LVD EASY-FORM 220/30 Plus, automatyczny magazyn […]

Zrobotyzowana automatyczna cela spawania MIG/MAG. Główne elementy celi: robot spawający YASKAWA AR2010, pozycjoner YASKAWA RWV2 o udźwigu 1000kg i przestrzeni roboczej 2000x1200mm na stronę, źródło spawalnicze FRONIUS TPSi/400 z procesami zwarciowym, PULS, LSC (Low Spatter Control), PMC (Puls Multi Control) i CMT (Cold Metal Transfer) wraz z cycle stepem. Zakres prac: Koncepcja, projekt, budowa, dedykowane […]

Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku.

11 października br. Ministerstwo Rozwoju i Technologii oraz Polska Agencja Rozwoju Przedsiębiorczości przedstawili założenia pilotażowego programu „Robogrant – pomoc na rozwój polskiej branży meblarskiej” oraz cyklu konferencji informacyjnych dla przedsiębiorców. W trakcie spotkania ogłoszono nabór wniosków do pilotażu – wnioski będzie można składać od 8 listopada do 6 grudnia 2022 r. Program jest finansowany ze […]

Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Zastosowanie toru jezdnego umożliwia obsługę 4 palet – 1 wejściowa, 3 wyjściowe.Główne elementy składowe: YASKAWA GP25 robot o udźwigu 25kg umieszczony na 4 metrowym torze jezdnym, prasa krawędziowa […]
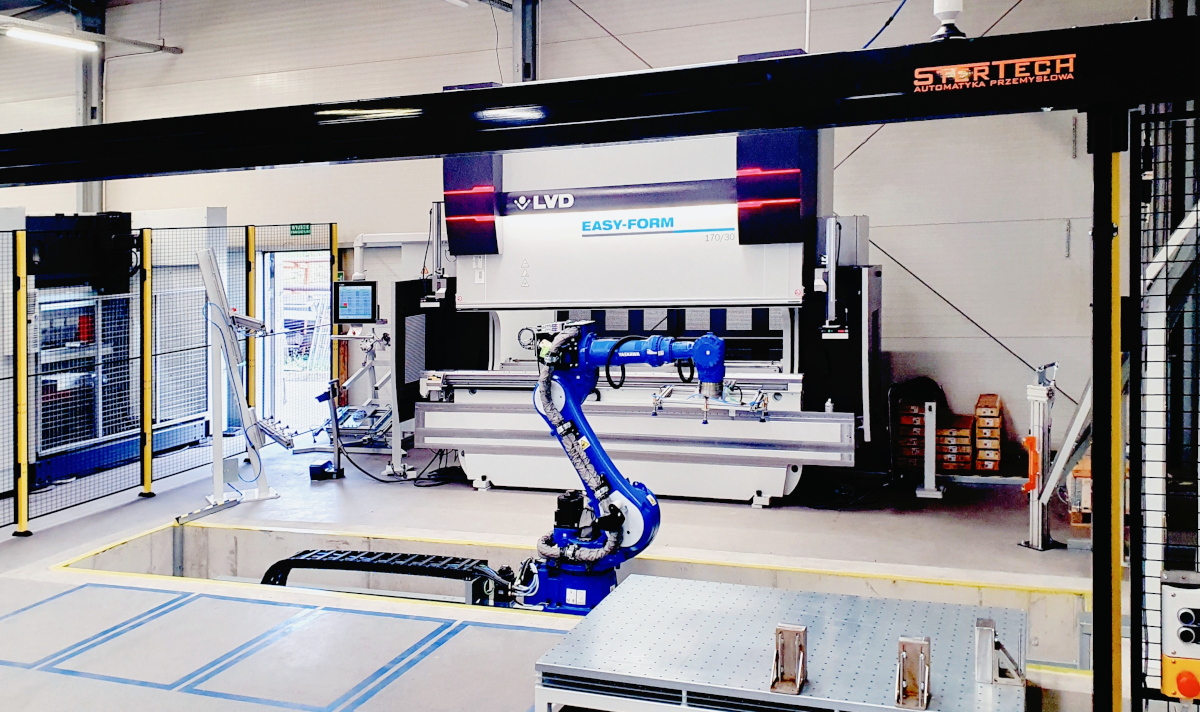
Robotyzacja prasy krawędziowej. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP110 robot o udźwigu 110kg umieszczony na 6 metrowym torze jezdnym, prasa krawędziowa LVD EASY-FORM 170/30, magazyn narzędzi, paleta wejściowa, pozycjoner, […]

Zrobotyzowana automatyczna cela spawania MIG/MAG. Główne elementy celi: robot spawający YASKAWA AR2010 umieszczony na 8-metrowym torze jezdnym, 2 obrotniki z konstrukcjami nośnymi na przyrządy 1,2×3,5m każdy, źródło spawalnicze FRONIUS TPSi/400 z procesami zwarciowym, PULS, LSC (Low Spatter Control), PMC (Puls Multi Control) i CMT (Cold Metal Transfer) wraz z cycle stepem. Zakres prac: Koncepcja, projekt, […]