Targi Warsaw Industry Automatica 2024
Zapraszamy! 📅 Kiedy? 14-16.05.2024📌 Gdzie? PTAK EXPO / TARGI WARSAW INDUSTRY AUTOMATICA

Zapraszamy! 📅 Kiedy? 14-16.05.2024📌 Gdzie? PTAK EXPO / TARGI WARSAW INDUSTRY AUTOMATICA

Jest nam niezmiernie miło 😊 poinformować Was o obecności STERTECH na zbliżających się targach Targi STOM Kielce – Salon Technologii Obróbki Metali.
Od 19-22.03.2024 będziemy gościć na jednym z najważniejszych wydarzeń branżowych – nie przegap okazji, weź udział i poznaj najnowsze rozwiązania w dziedzinie robotyzacji produkcji.
📅 Kiedy? 19.03 – 22.03.2024
📌 Gdzie? TARGI STOM Kielce

Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP50 robot o udźwigu 50kg, prasa krawędziowa RICO, automatyczny magazyn narzędzi robota, paleta wejściowa, pozycjoner, stacja przechwytu detali, laserowy […]

Robotyzacja prasy mimośrodowej/korbowej – kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP180 robot o udźwigu 180kg, maksymalnym zasięgu 2702 mm i doskonałą powtarzalnością na poziomie +/- 0,05 mm, prasa korbowa SANGIACOMO, […]

Robotyzacja prasy krawędziowej w zaledwie kilka minut! Chcesz poznać więcej szczegółów – skontaktuj się z nami.

Robotyzacja prasy krawędziowej w zaledwie kilka minut!RBCell12 – Mobile Robotic Bending Cell – przenośne zrobotyzowane stanowisko do gięcia blach. Główne składniki zrobotyzowanej celi:– Mobilna platforma z wygrodzeniem– Robot Yaskawa GP12 – udźwig 12kg– Magazyn detali do gięcia– Stacja pozycjonowania– Stacja przechwytu– Przenośnik taśmowy Obsługa prasy krawędziowej:– ręczna– automatyczna Chcesz poznać więcej szczegółów – skontaktuj się […]
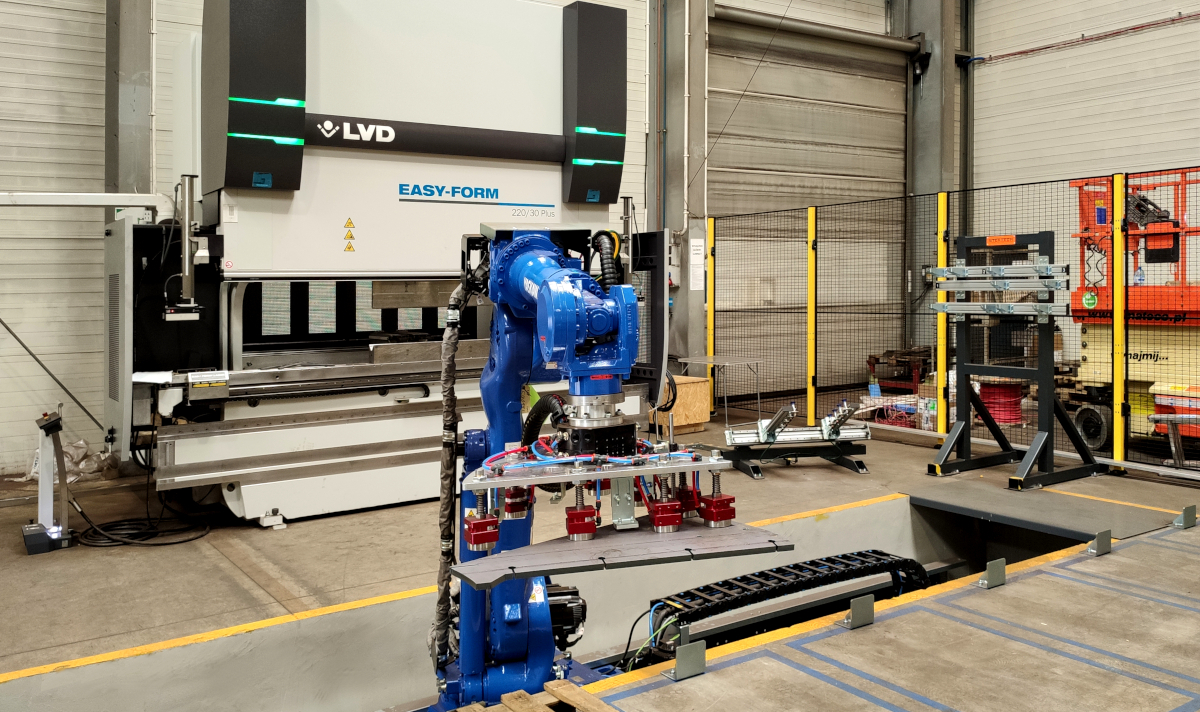
Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP180 robot o udźwigu 180kg umieszczony na 6 metrowym torze jezdnym, prasa krawędziowa LVD EASY-FORM 220/30 Plus, automatyczny magazyn […]

Robotyzacja prasy krawędziowej. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP50 robot o udźwigu 50kg umieszczony na 4 metrowym torze jezdnym, prasa krawędziowa BYSTRONIC Hammerle 250 3P, automatyczny magazyn narzędzi robota, […]

Robotyzacja prasy krawędziowej. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP250 robot o udźwigu 250kg umieszczony na 8 metrowym torze jezdnym, prasa krawędziowa LVD PPEB 320/51, automatyczny magazyn narzędzi robota, paleta […]

Zrobotyzowana automatyczna cela spawania MIG/MAG. Główne elementy celi: robot spawający YASKAWA AR2010, pozycjoner YASKAWA RWV2 o udźwigu 1000kg i przestrzeni roboczej 2000x1200mm na stronę, źródło spawalnicze FRONIUS TPSi/400 z procesami zwarciowym, PULS, LSC (Low Spatter Control), PMC (Puls Multi Control) i CMT (Cold Metal Transfer) wraz z cycle stepem. Zakres prac: Koncepcja, projekt, budowa, dedykowane […]