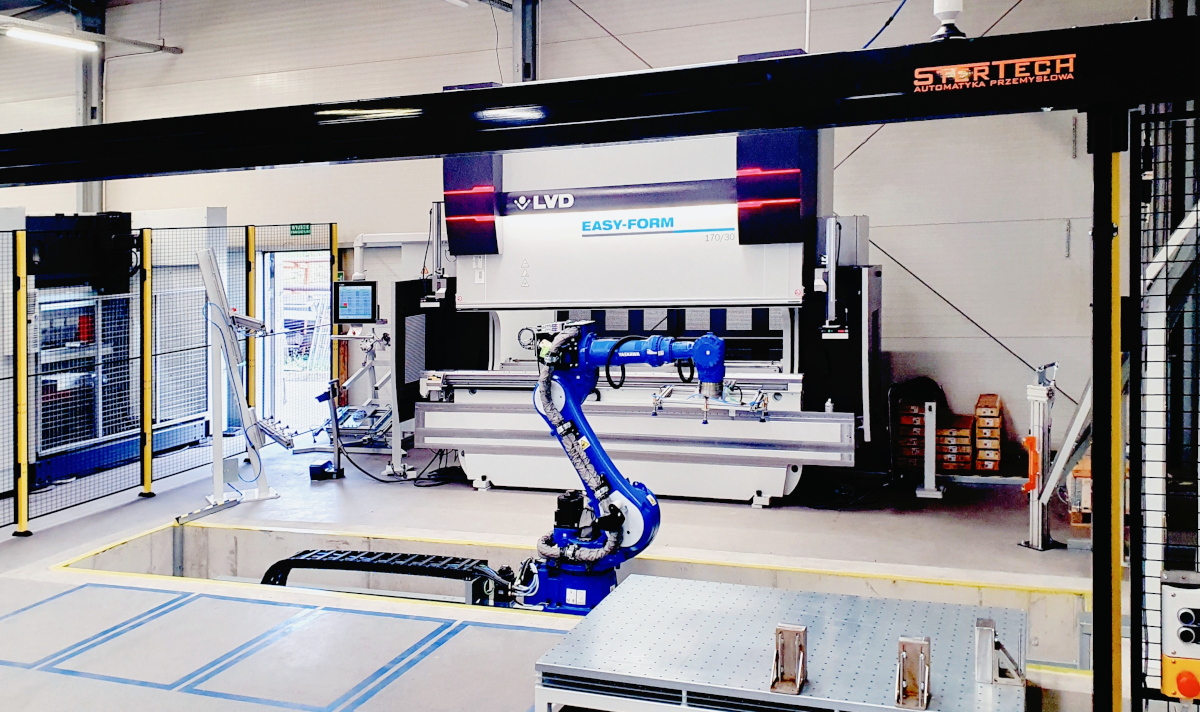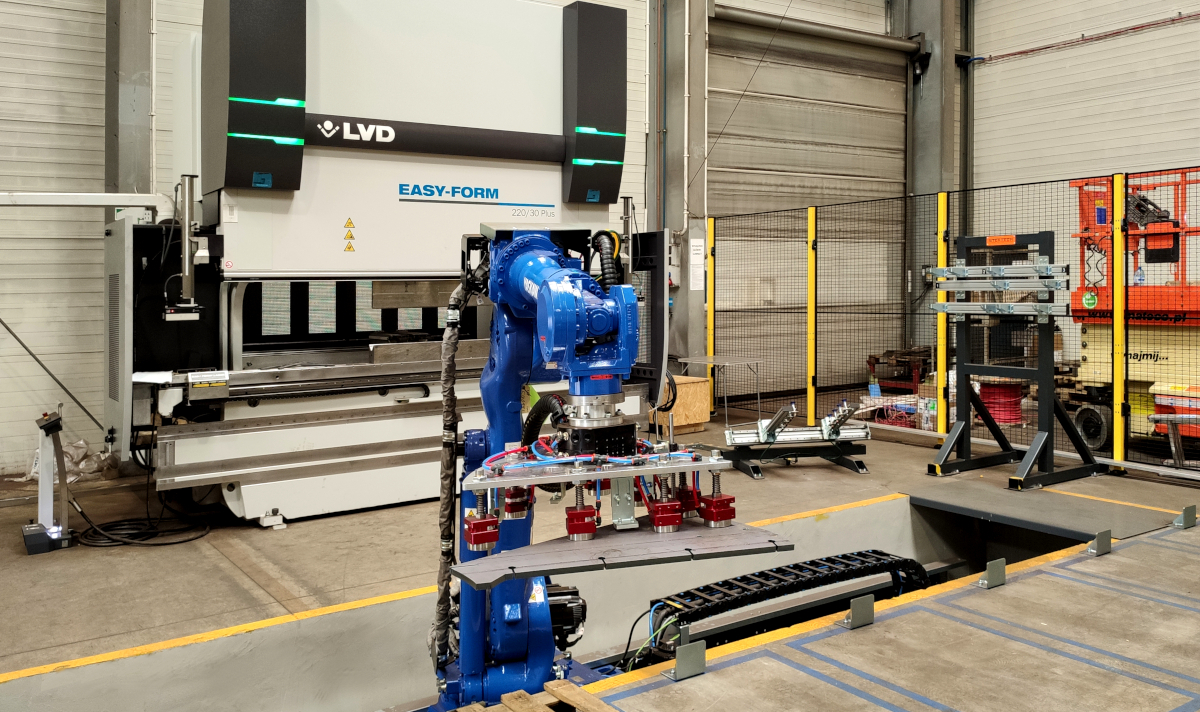
Robotyzacja prasy krawędziowej. Robot 6-osiowy Yaskawa GP180 tor 6mb, prasa krawędziowa LVD EASY-FORM 220/30 Plus
Robotyzacja prasy krawędziowej. Zrobotyzowane gięcie. Kompleksowa realizacja wykonywana w całości przez naszą firmę. Koncepcja stanowiska, projekt mechaniczny, projekt, elektryczny, oprogramowanie robota oraz pozostałych komponentów systemu, uruchomienie całości stanowiska oraz oddanie do użytku. Główne elementy składowe: YASKAWA GP180 robot o udźwigu 180kg umieszczony na 6 metrowym torze jezdnym, prasa krawędziowa LVD EASY-FORM 220/30 Plus, automatyczny magazyn […]